

大成建設は、未来の建設を見据え、デジタル技術を活用した建設プロセスに取り組んでいます。
従来のプロセスを全体共有しながら、一人一人がデータの精度・確度を高め、信頼できるナレッジデータベースを構築・活用します。思考や検証を含めた一連のプロセス、熟練社員の技から専門性の高い先端技術まで、NEXTな技術がつながる未来の建設が待っています。

大成建設は、未来の建設を見据え、デジタル技術を活用した建設プロセスに取り組んでいます。
従来のプロセスを全体共有しながら、一人一人がデータの精度・確度を高め、信頼できるナレッジデータベースを構築・活用します。思考や検証を含めた一連のプロセス、熟練社員の技から専門性の高い先端技術まで、NEXTな技術がつながる未来の建設が待っています。



BIM/CIMを中心としたデータベースを構築し、データの収集と活用によって効率的な作業と品質の高いモノづくりを実現します。
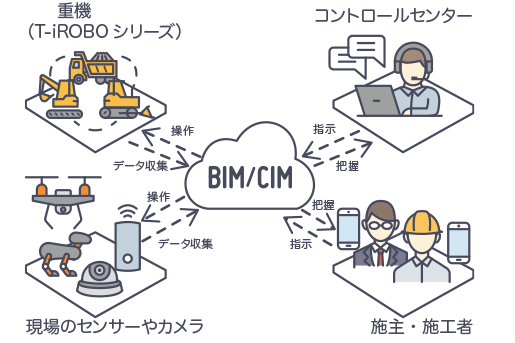
建設現場にも各種センサーやカメラを配置し、常にコントロールセンターから工事の安全と進捗を監視しています。BIM/CIMによって建設現場と建設重機、コントロールセンター、建築主と設計者、施工者がつながり、WEB上で重機の遠隔操作や作業の指示、現場の状況を確認でき、それらの情報の分析から、さらに安全で高品質な工事を推進します。





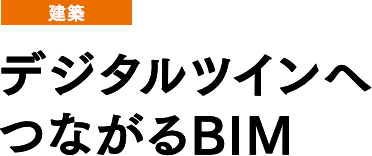
新築・既存を問わず建物をデータベース化(BIM)し、図面活用・IoT連携・ロボット統合管理・品質管理・コスト管理・BI活用を見据えた建設プロセスの基盤となるBIMをクラウドで管理し、プロセスとリンクしたデジタルツインを構築します。

建築現場におけるDXの標準基盤となる「T-BasisX」を構築し、建築現場におけるDX推進の加速と生産性向上を図ります。通信機能に優れたメッシュWi-Fiアクセスポイントと測位用受信機器を一体化させて利用することで、少数機器でのWi-Fi通信と高精度位置把握を可能とし、現場での無線環境整備の省力化とコスト削減を実現します。携帯電波が届かないために先進技術の導入が困難だった地下や高層階などにおいても、様々なデータを収集・分析して一元化利用することが可能となり、現場の安全・品質管理や生産性向上に繋げると共に、顧客への報告や遠隔からの現場支援にも活用できます。

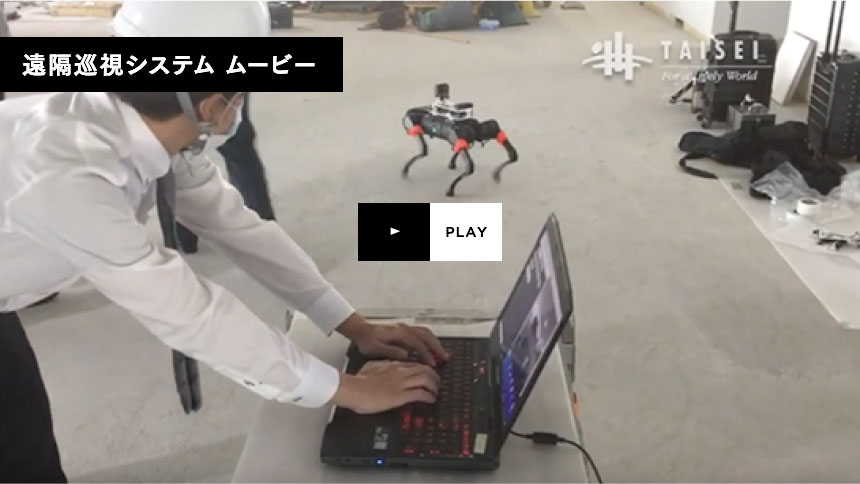
ロボットによる建設現場での遠隔巡視を実現するため、遠隔操作、映像、双方向音声通話などの複数機能を備えた「T-iRemote Inspection」を開発しました。 本システムを搭載した優れた運動性能を備えた四足歩行ロボットの活用により、現場内での検査や安全確認などの巡視業務の効率化を実現します。ロボットが現場内を歩行し、搭載された360°カメラによる映像記録、定点写真撮影や工程進捗管理など、遠隔巡視による現場管理への活用が可能です。

生コン情報をリアルタイムに見える化し、コンクリート工事の品質と生産性向上を実現するクラウドシステムです。生コン工場と連携し、出荷時に生コン伝票情報をクラウドへ上げて、リアルタイムに共有します。工事関係者はスマートフォンやタブレット等によりどこからでも打設の状況を確認することができ、見える化によるコンクリート工事の品質向上や現場の生産性向上に寄与します。国土交通省が推進する i-Constructionのサプライチェーンマネジメントに対応しています。
計測センサのデータ、定点WEBカメラやウェアラブルカメラの映像、GPS搭載車両の位置情報、作業員が装着したスマートウォッチからのバイタル情報など、様々な施工情報(実体情報)をリアルタイムにクラウドの仮想空間で表示することで CPS (Cyber-Physical Systems)のデジタルツインを実現し、高付加価値の情報を工事関係者にフィードバックします。これにより、今まで無かった気付きなどを反映した高度な現場管理を実現し、遠隔臨場や協議なども可能にし、発注者の生産性向上にも貢献します。

クレーンブーム先端部および作業員に装着したGNSSの位置データや映像を基に、クレーン同士の接近や吊荷下に近づいている作業員を抽出します。クレーンオペレーターには運転席のモニター表示と音声で、作業員にはスマートウォッチなどを通してアラートを発することで、クレーンの衝突や吊荷との接触などの危険が迫っていることを周知し、事故を未然に防ぐことができます。


生産労働人口の減少や高齢化が社会的な問題となる中、生産性向上や人手不足の解消は、建設産業においても大きな課題となっています。そのため、近年、国土交通省が推進しているi-Constructionにおいて、様々なICTの活用により、建設現場での生産性は徐々に向上してきていますが、今後、深刻化が予想される人手不足に対応するためには、更なる生産性向上への取り組みを加速する必要性があります。中でも建設機械の自動協調運転技術は、建設現場で早期に確立が望まれる技術の一つです。 このような背景から、大成建設は以下の技術の開発を進めています。

人とロボットの協働を目的として、大成建設が開発した作業用ロボットシリーズです。シリーズには以下のラインナップがあります。

振動ローラーが自動で転圧作業を行う転圧走行無人化施工システム。締固め範囲と回数・重複幅を指定するだけで、振動ローラーが施工位置を把握しながら、自ら判断して自動で締固め作業を行います。

ブレーカ搭載油圧ショベルによる自動で破砕する割岩無人化施工システム。割岩したい岩を指定するだけで建設機械が自ら判断して岩に接近し、自動で破砕します。

ピット内の土砂と積込機を認識して自動的に掘削積込を行う無人化施工システム(キャタピラージャパン合同会社と共同開発)。油圧ショベルによるダンプトラックへの土砂積込み作業を自動で行います。

人体検知システムを搭載した自動運転クローラダンプ(株式会社諸岡と共同開発)。走行ルート・積込み場・排土場を指定するだけで、自動で土砂の運搬作業を行います。
複数の自動運転建設機械の協調運転を制御するシステムです。本システムの適用による、有人建機との連携や自社開発に加え他社開発の様々な機種・制御方式の自動建機との協調運転の実用性を確認し、施工現場におけるDX(デジタルトランスフォーメーション)戦略を推進します。

建設機械のメーカーによらず、自動運転、有人運転のいずれにも対応でき、条件が整えば最大32台までの複数機種の建設機械の協調制御が可能です。今回の実証では、当社開発の4機種の自動運転建設機械を用いて、「掘削・積込」、「運搬」、「敷均し」、「転圧」の施工を制御し、一連の作業の協調運転を業界に先駆けて検証しました。


建設機械の周辺環境を示す地図作成と自己位置推定を3次元で同時に行うSLAM技術※1を活用した位置情報取得技術です。この技術の導入により、GPS等の位置情報が届かないトンネル坑内でも随時位置情報を取得でき、施工現場の周辺環境変化に的確に対応した無人建設機械の自動運転を実現します。
※1:Simultaneous Localization And Mappingの略称。 自己位置推定と環境地図作成を同時に行い、移動体が「センシングによって得た計測値」と「移動することで得た計測値」を照らし合わせ、その誤差を収束計算することで、作成した地図上に自己位置を推定する技術。
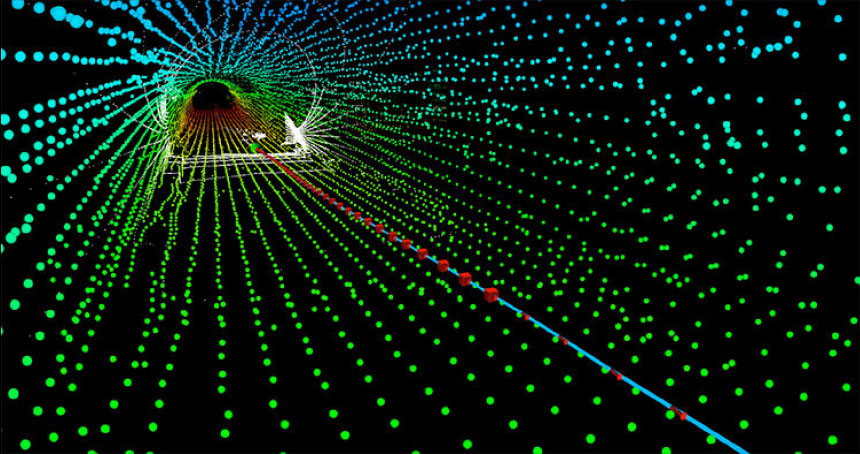
センシング装置で取得したデータを基に作成した環境地図と建機自己位置推定状況
(トンネル内地図情報(緑点・青点)、建設機械位置・走行予定ルート(赤点・青線)を表示)

建設中のトンネル坑内でのSLAM技術を活用した自動運転状況